Weiter geht es mit dem RAS-Mast. Zunächst sind die beiden senkrechten Rahmen des Portalträgers herzustellen, die, bis auf die Kette R20n/R21n, problemlos zu bauen sind. Bei der Kette ist die Schwierigkeit, dass diese „auf Zug“ sein sollte, wenn es gut aussehen soll. Vielleicht hätte ich an dieser Stelle eine richtige Kette nehmen sollen statt des Kartons.
Die beiden oben abgebildeten Rahmen sind beim Vorbild nicht spiegelbildlich sondern gleich. Das gilt auch für den weiteren Bau des Portals. Warum das so ist, weiß wohl nur der Konstrukteur des 1:1-Modells. Leider ist das im Bogen bei den Teilen R21b+c nicht berücksichtigt. Das ist aber nicht schlimm, denn später sind die falschen Markierungen nicht mehr zu sehen.

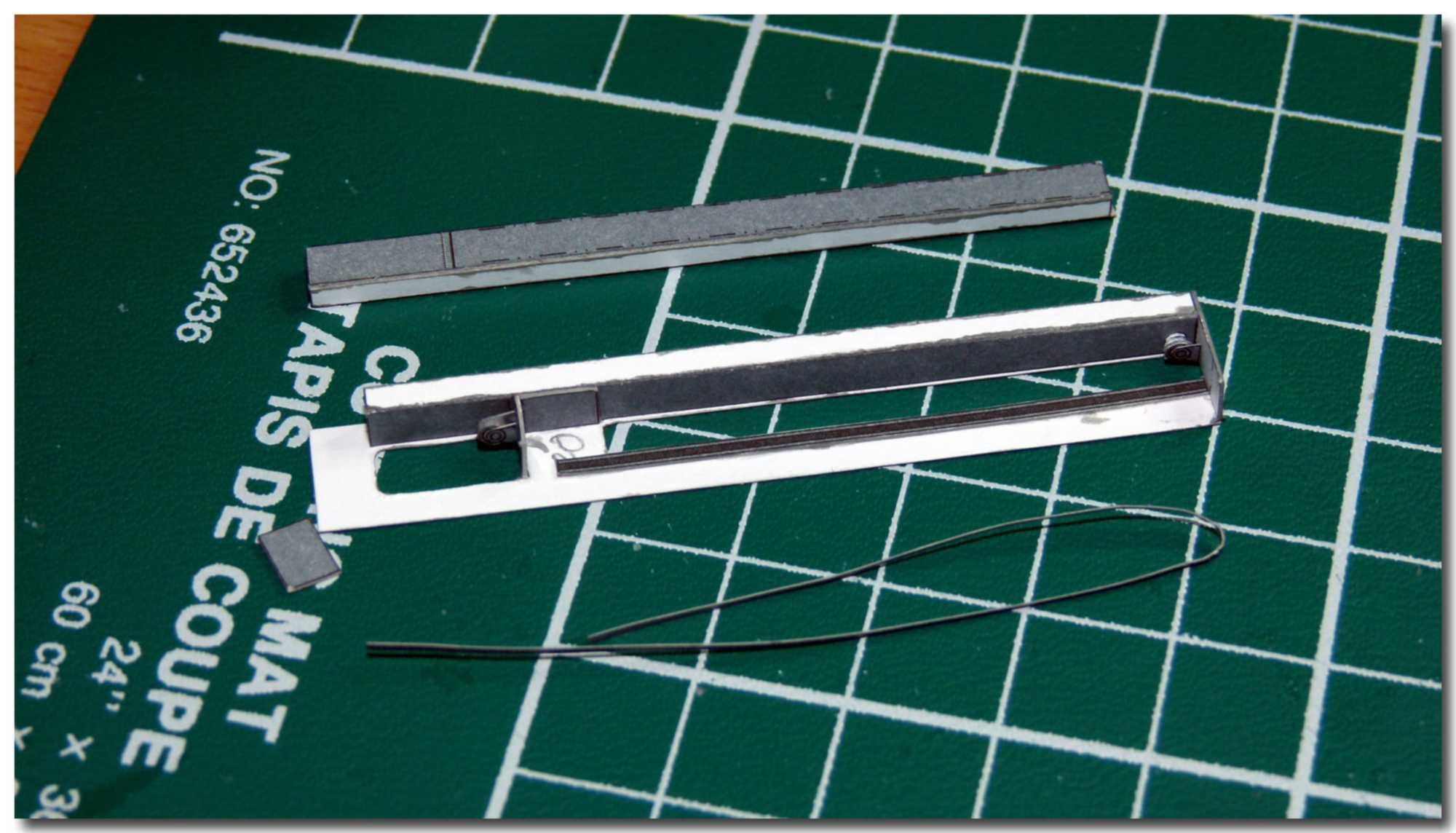
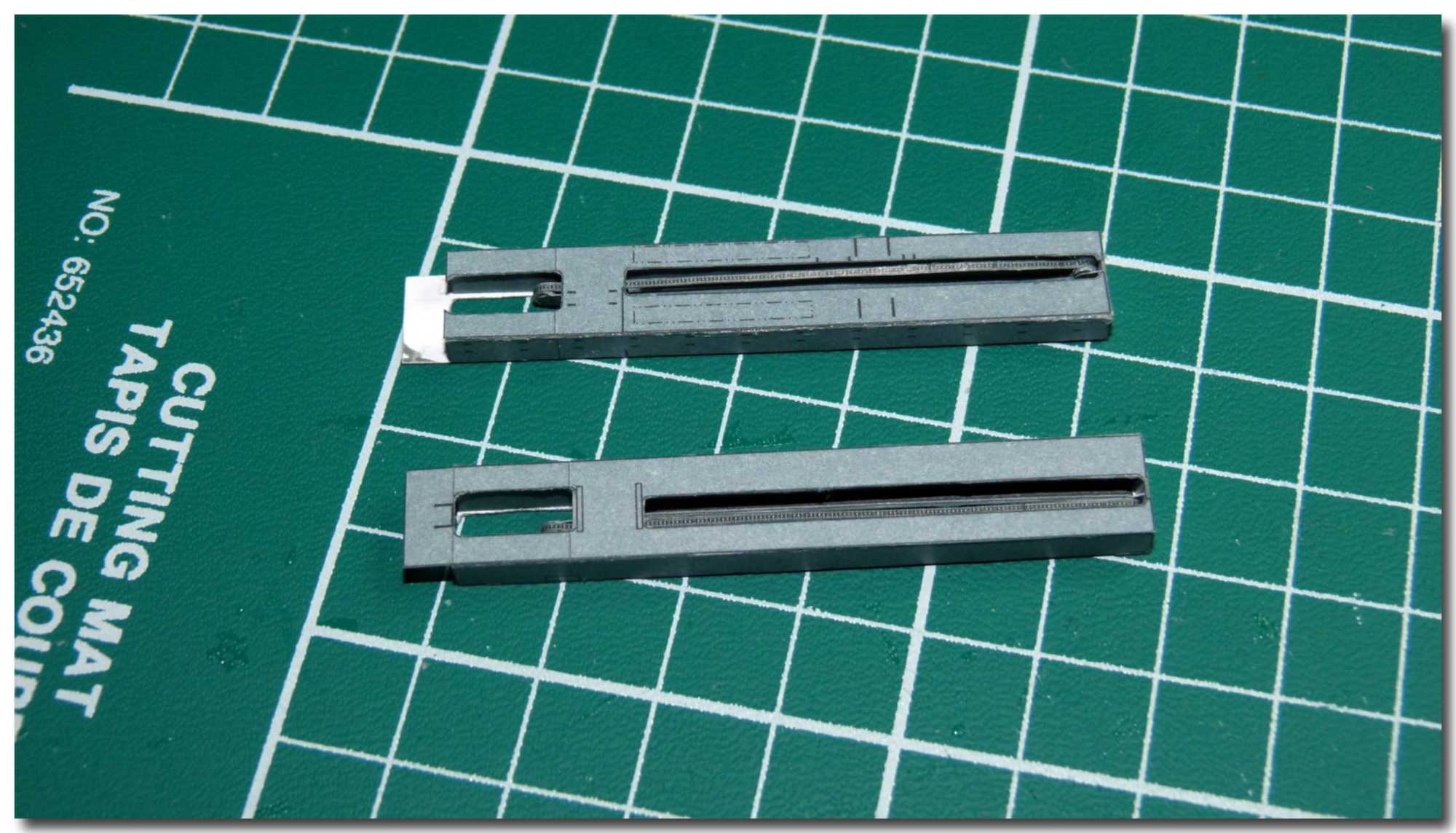
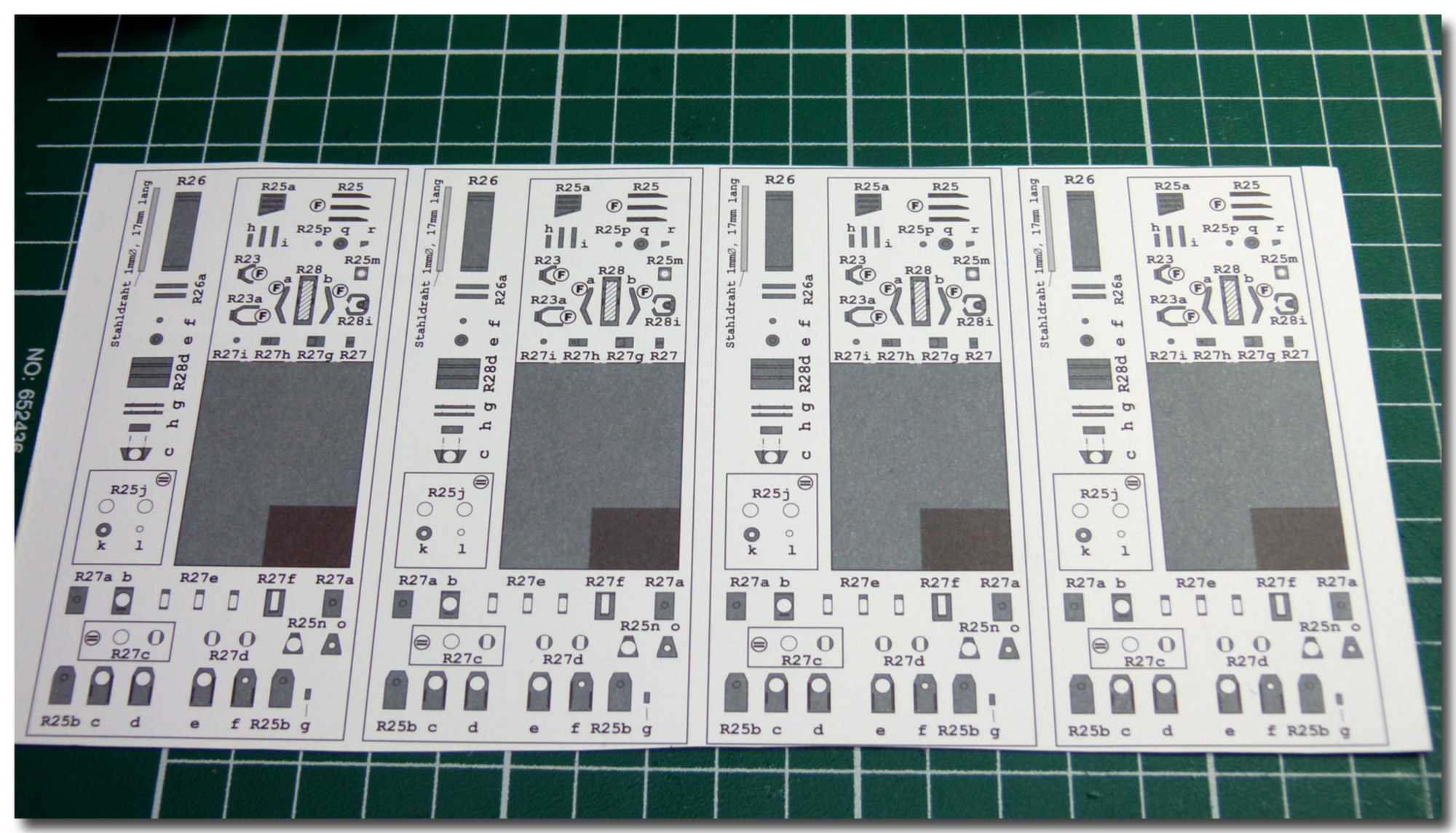
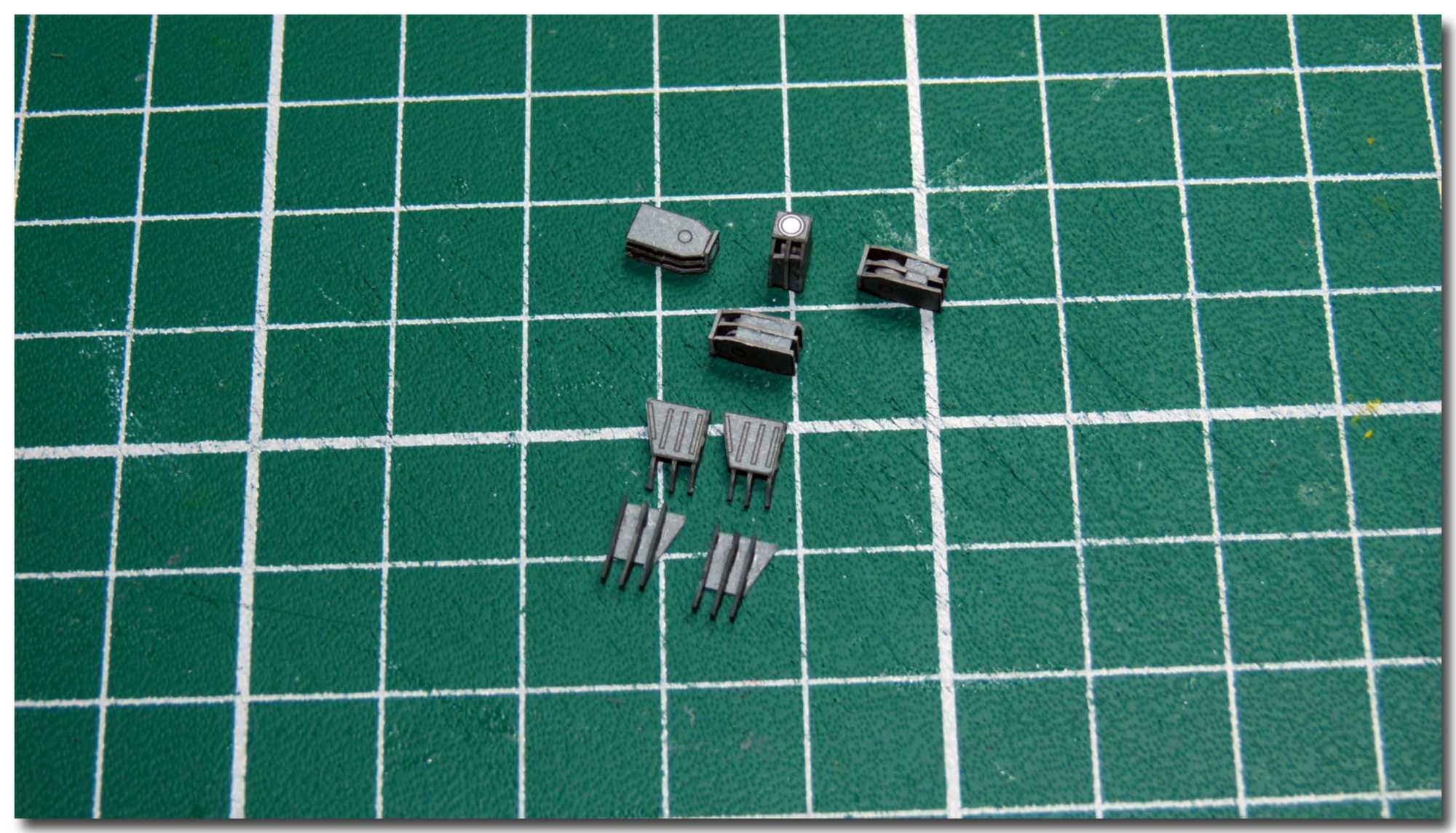
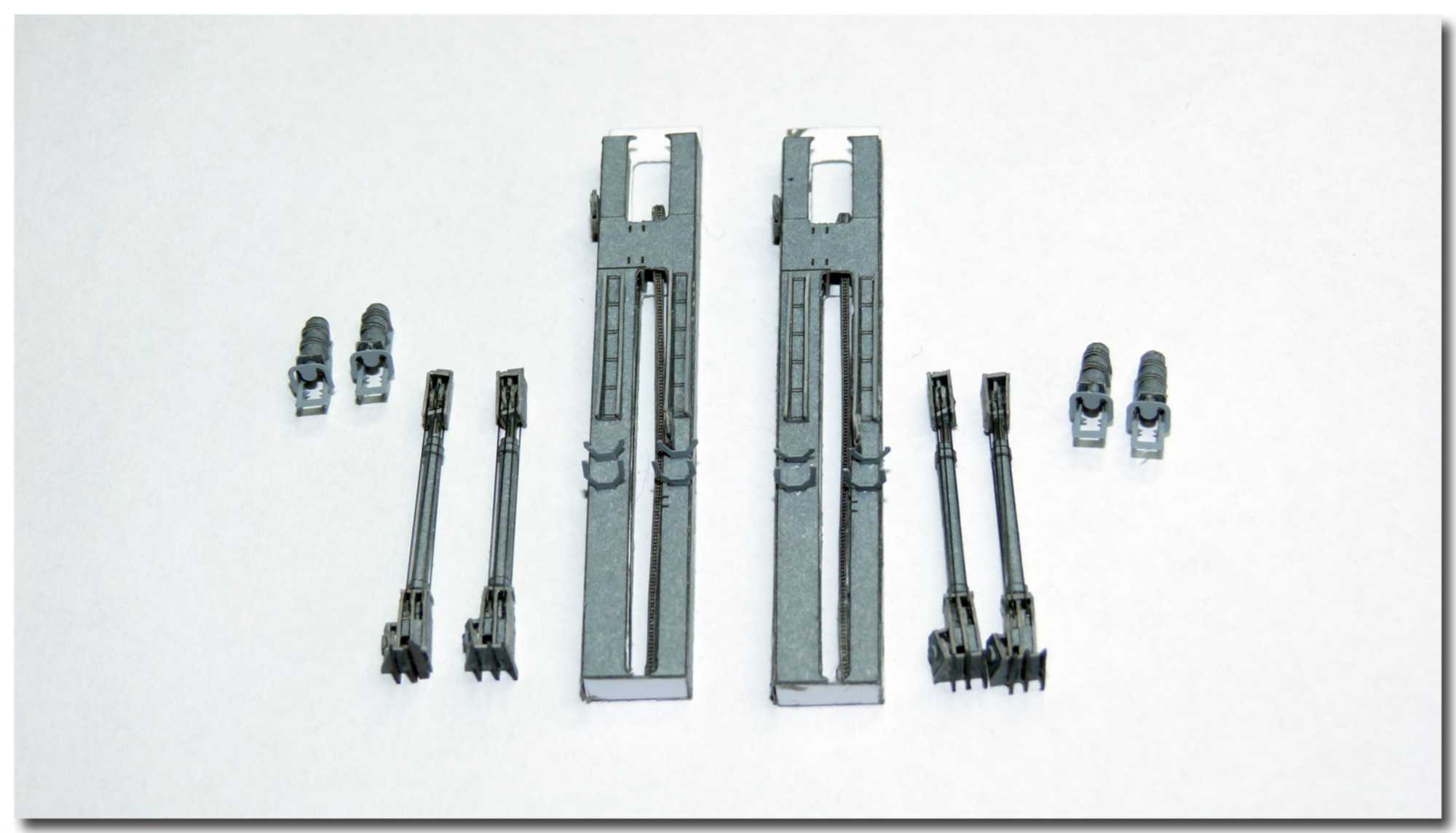
Etwas unübersichtlich und nicht gerade motivierend erscheinen die Bauteile für die Hydraulikstempel, die für die Spannung der festen Seil-/Leinenverbindung zum zu versorgenden Schiff zuständig sind.
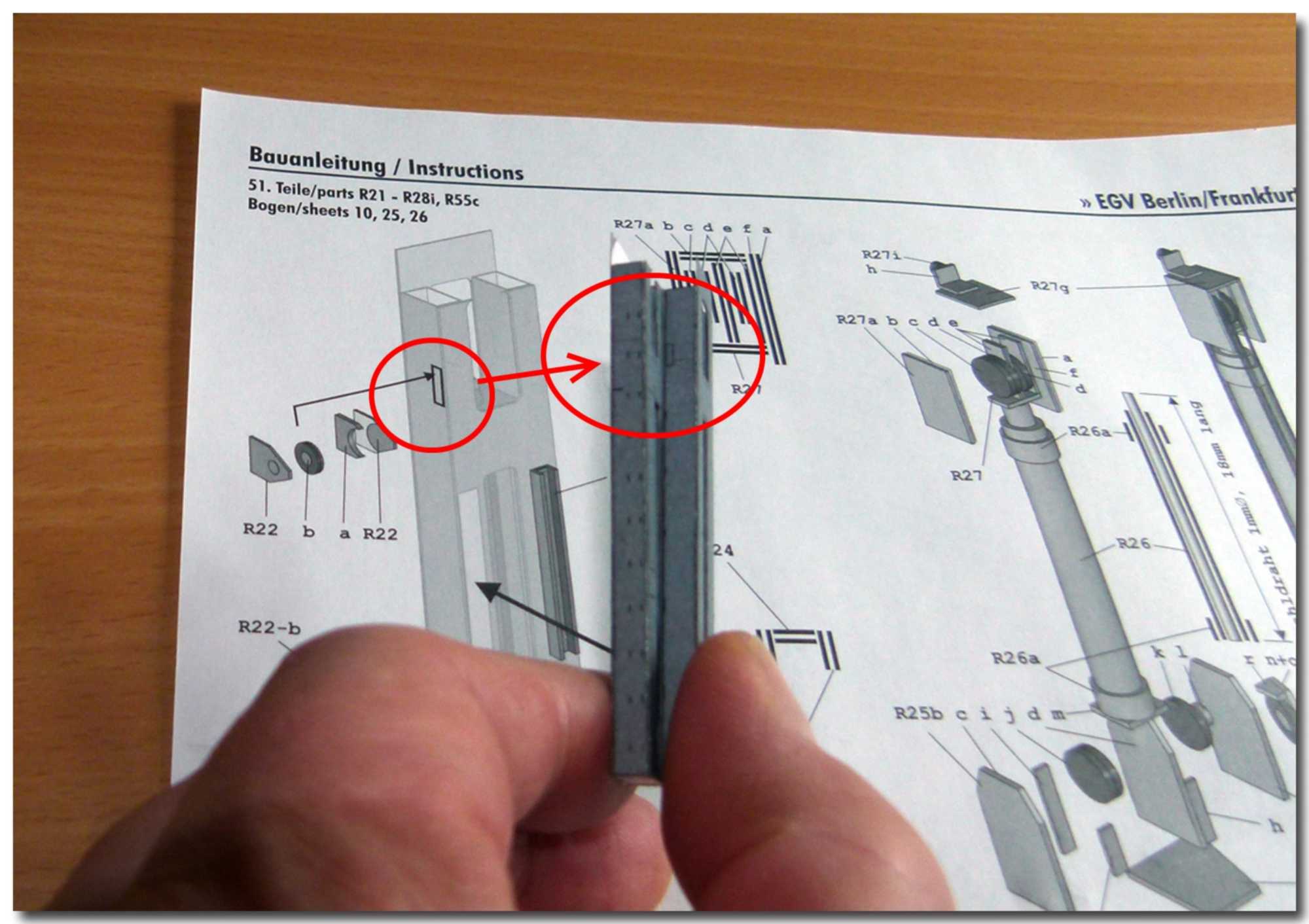
Bei den Füßen der Hydraulikeinheiten gibt es Differenzen zwischen den Bildern der Anleitung und den Bauteilen. In den Bildern erscheinen die Füße gespiegelt, das ist aber falsch. Die Bauteile sind richtig und somit sind vier gleiche Einheiten zu bauen.
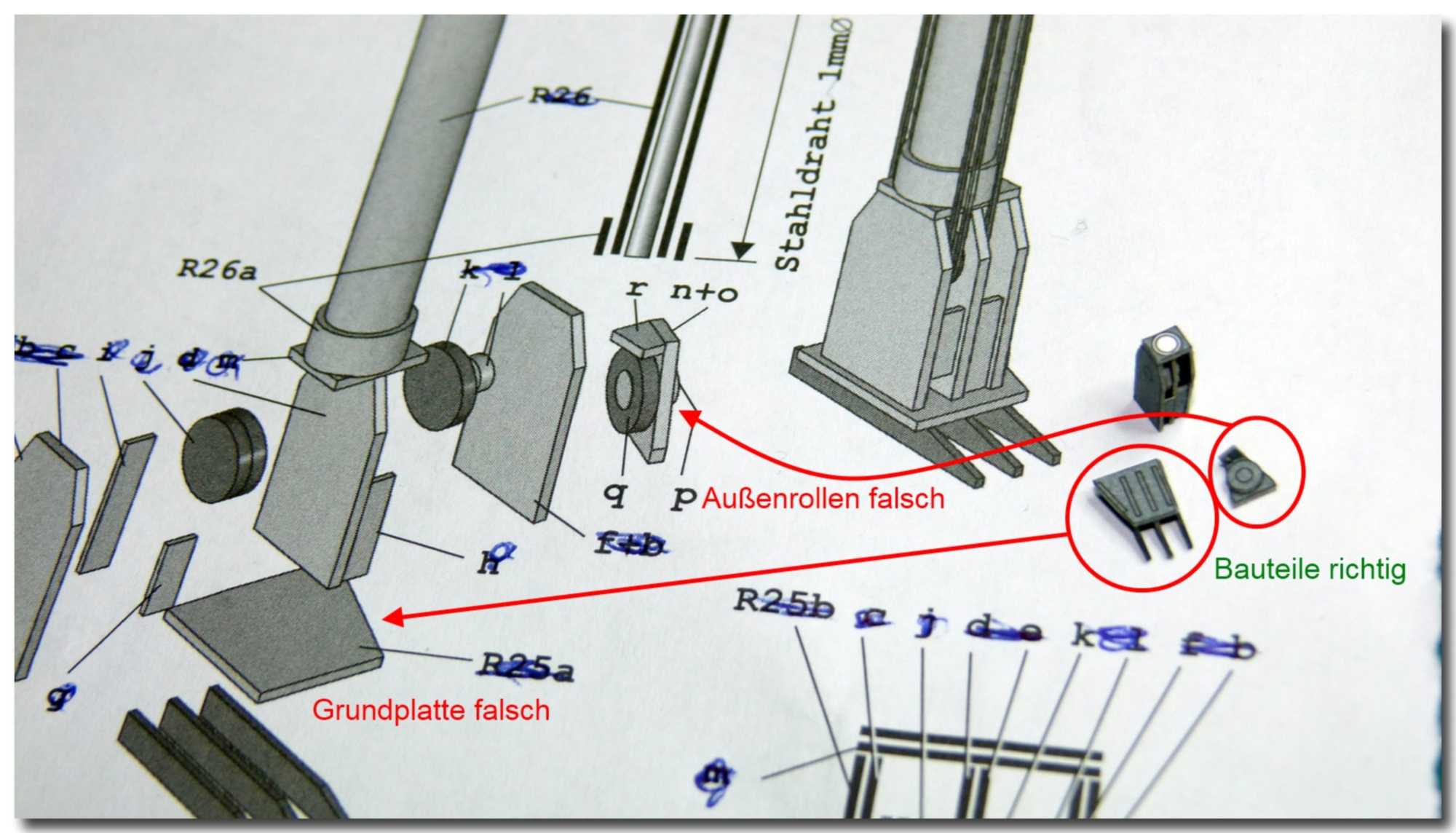
Bei den Rollen am oberen Ende der Hydraulikeinheit ist in der Schnittzeichnung der Abbildung 51 auch nicht alles richtig. Die Korrektur folgt hier.


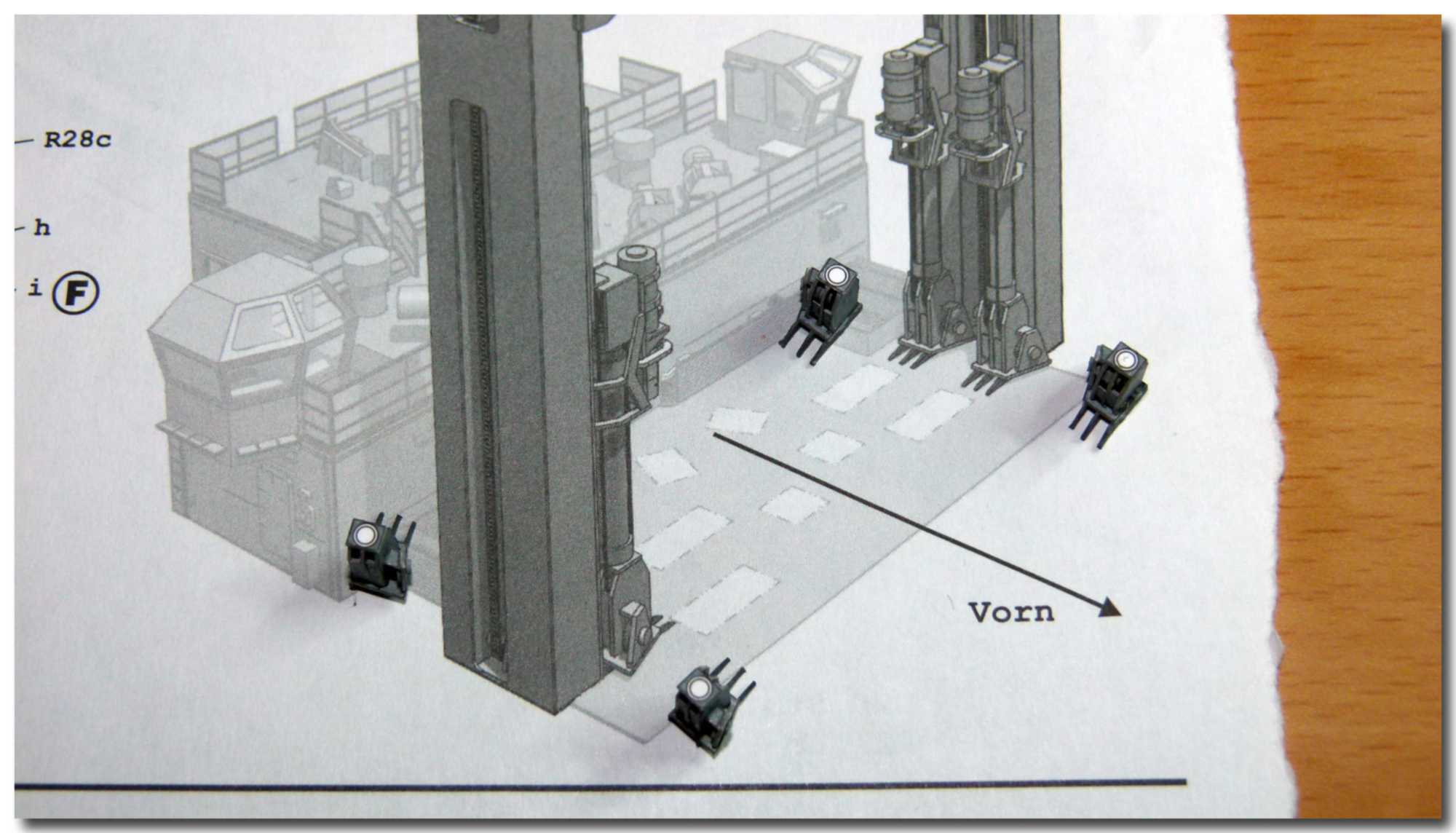
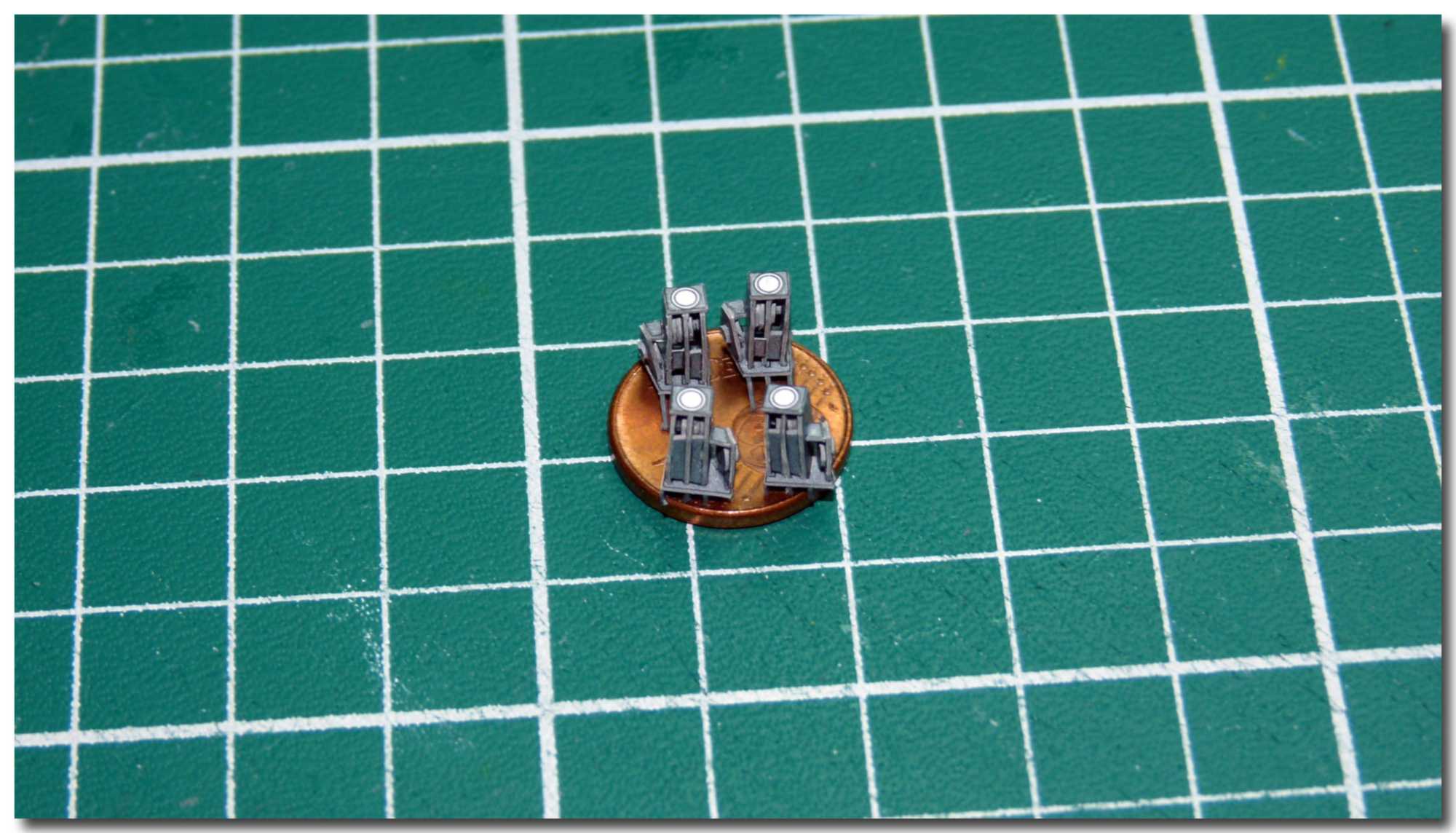
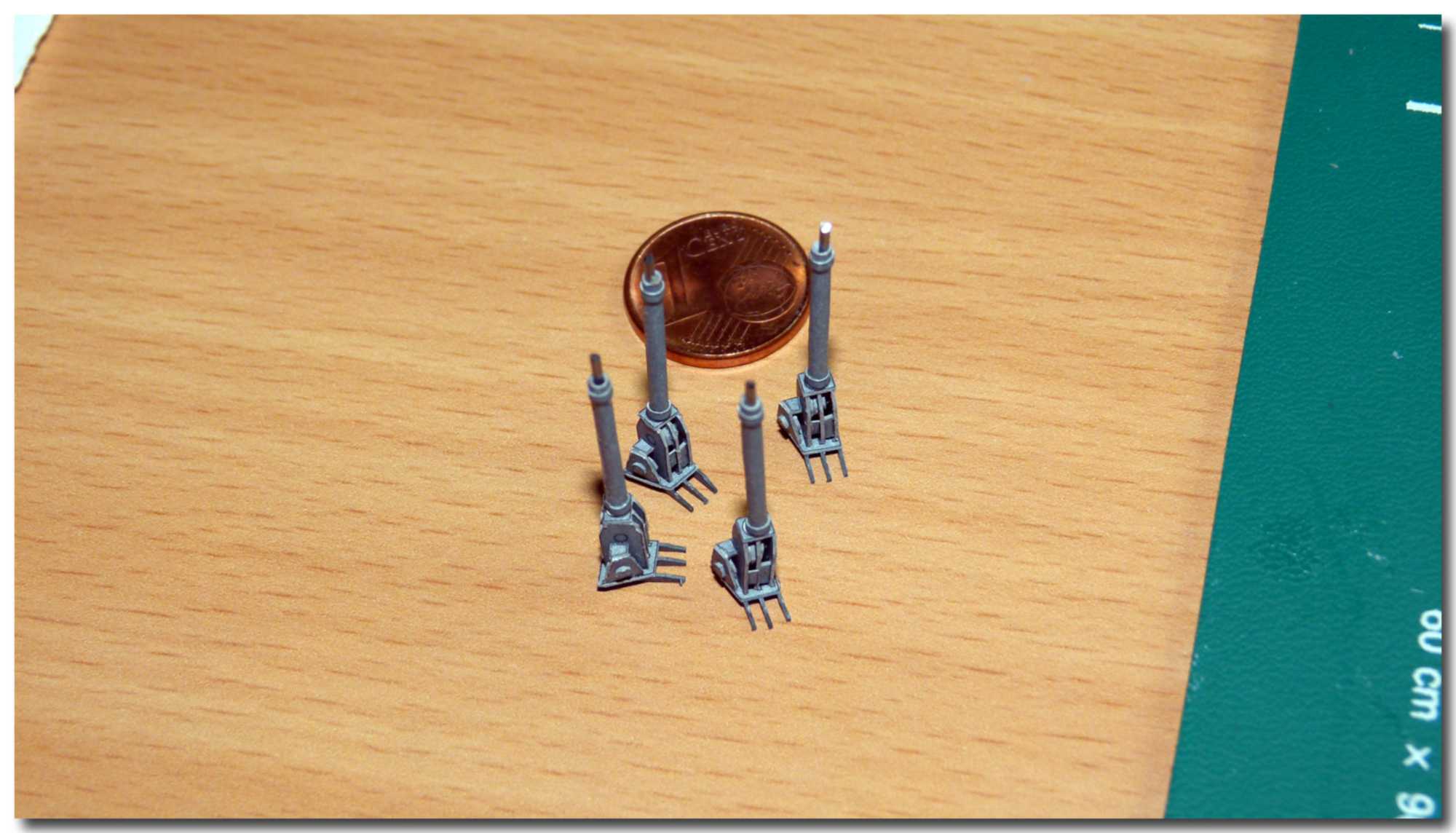
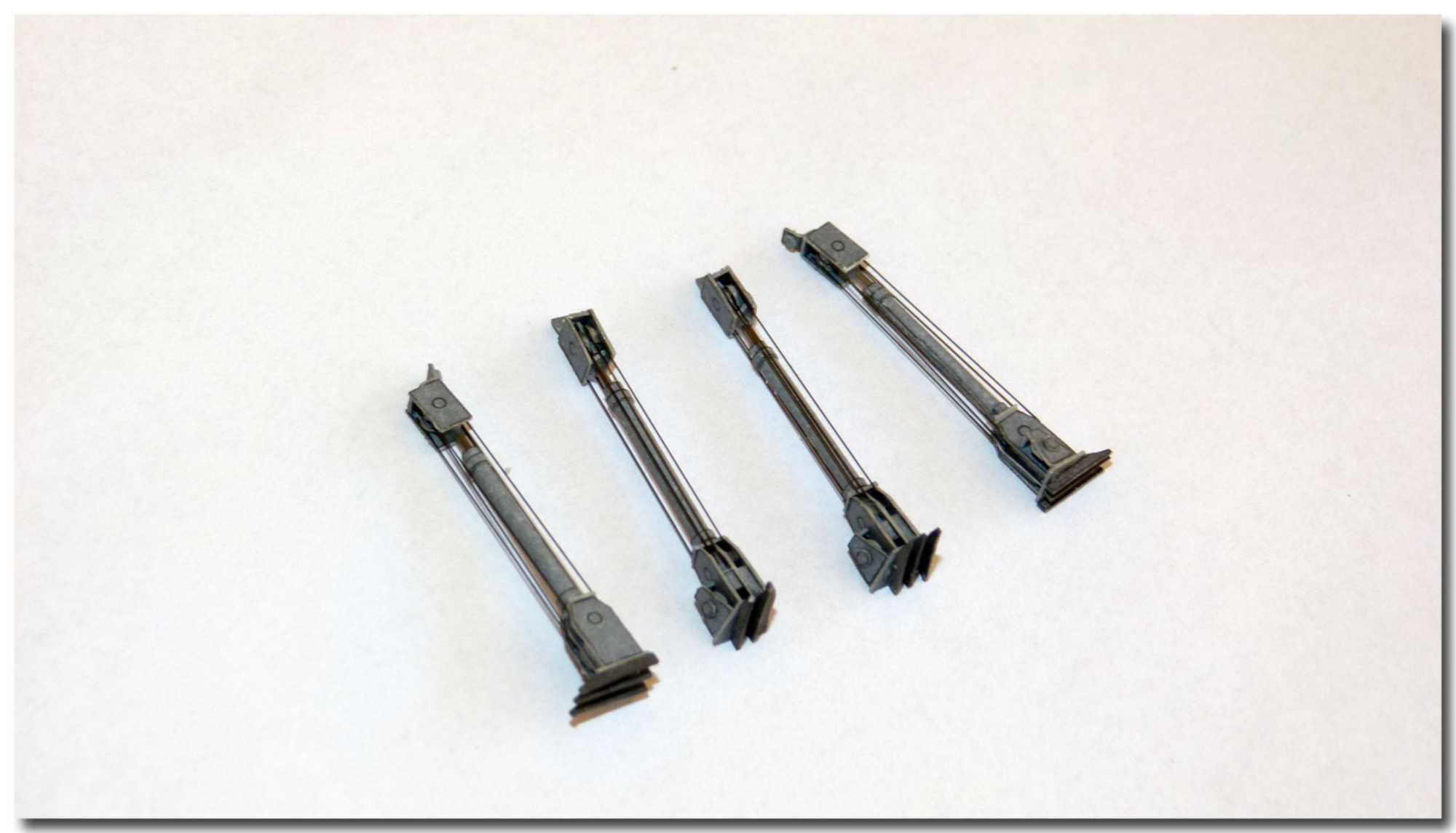
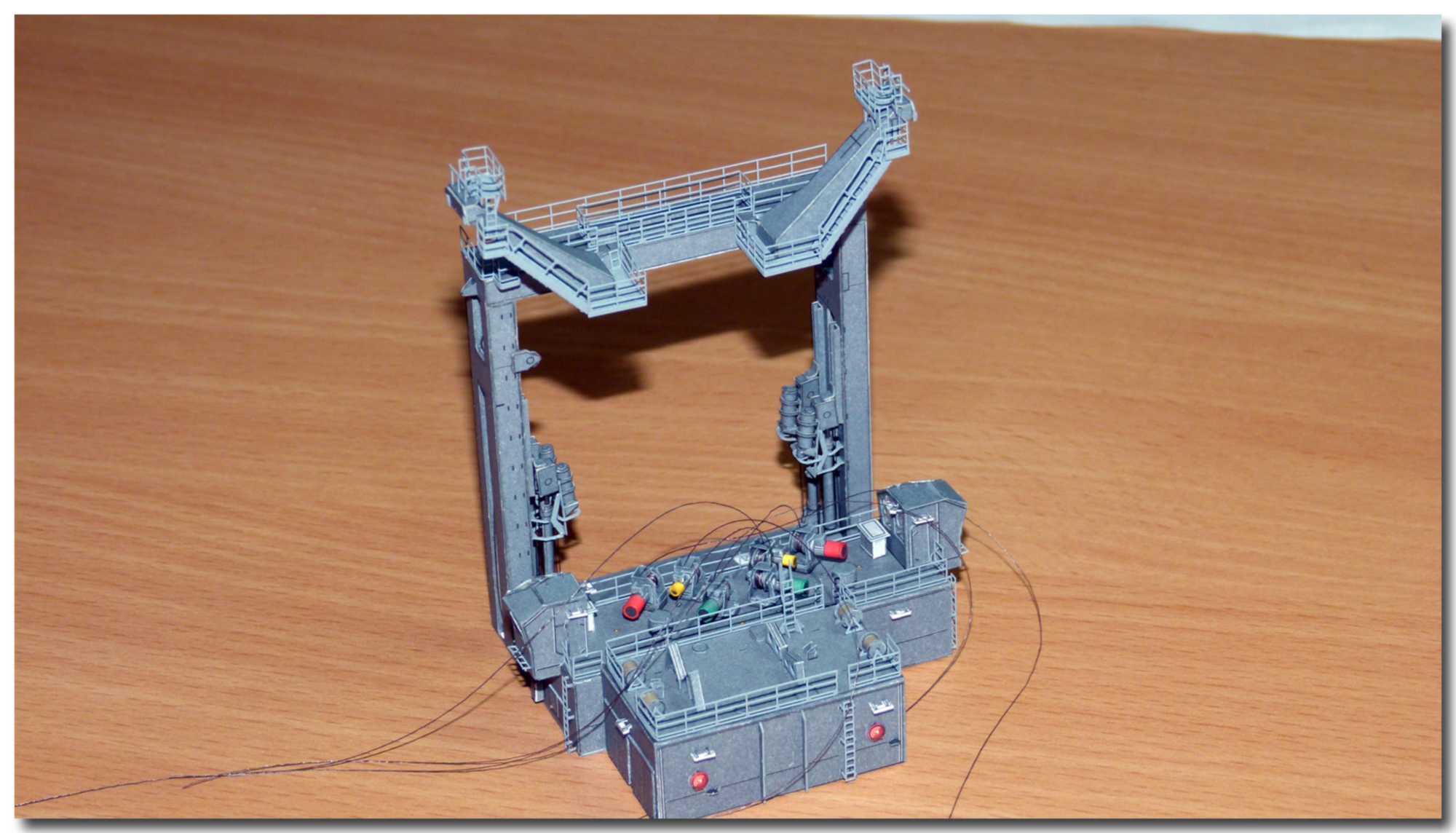
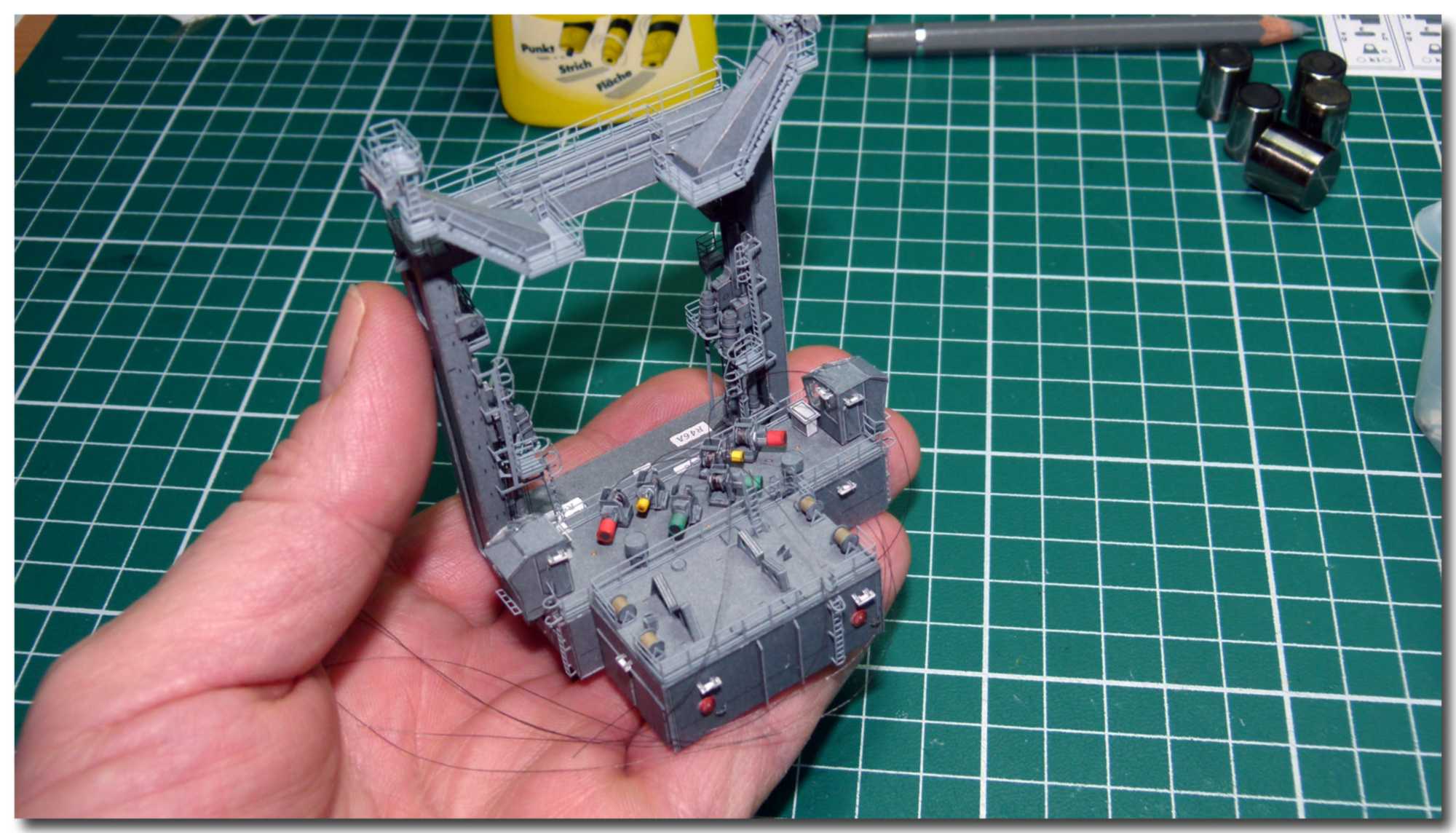
Die vier fertigen Stempel und die Antriebe sehen bei mir wie auf den beiden folgenden Bildern aus. Die Seile sind mittels „WonderWire“ (ein Keramik-Draht mit ca. 0,015mm Durchmesser, der bisher nur in den USA erhältlich ist) ausgeführt.

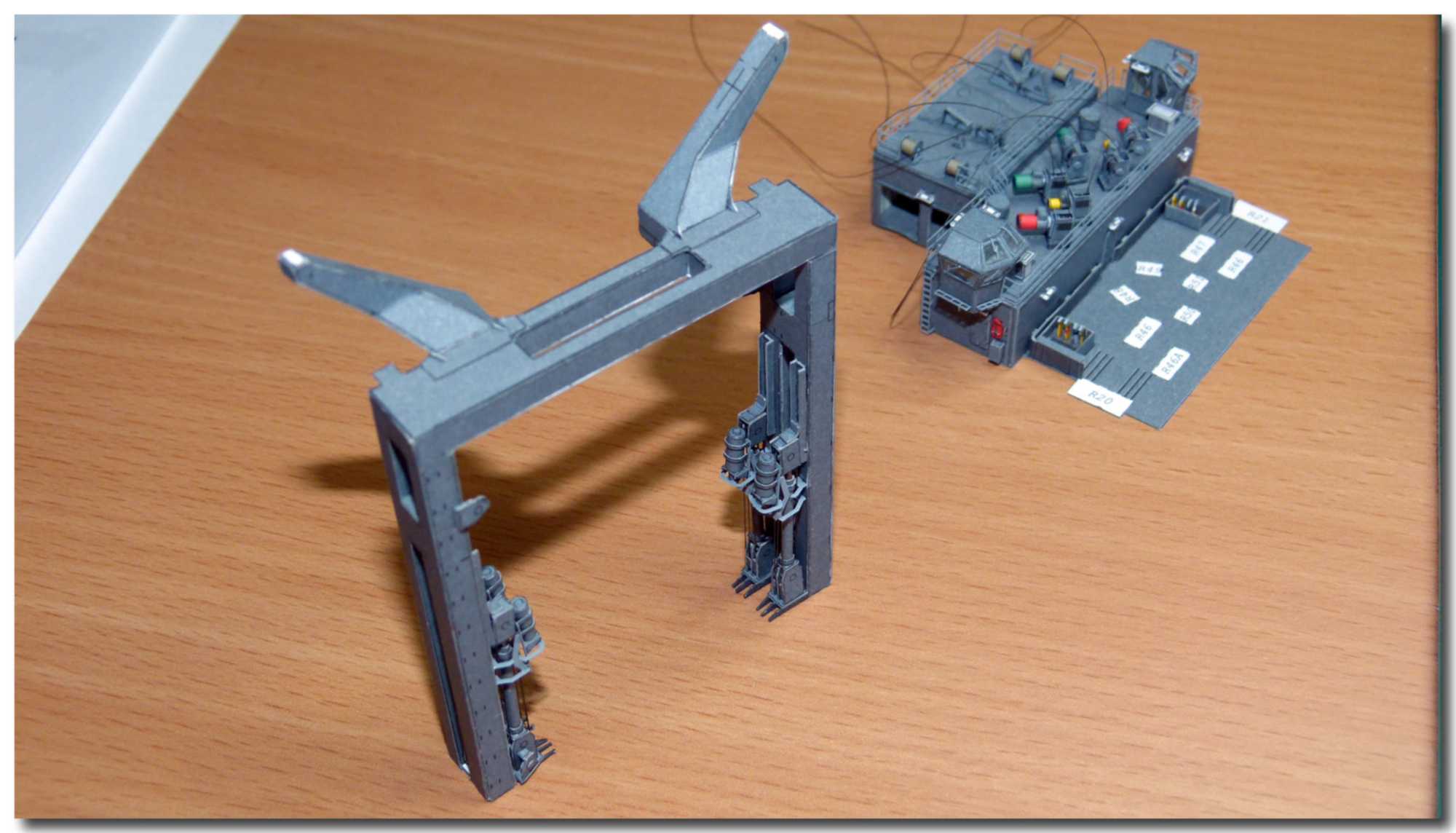
Es folgt der Zusammenbau der einzelnen Baugruppen.

Zwischen die beiden Rahmenteile kommt dann oben der Querträger mit den beiden großen Auslegern. Dazu noch ein paar Podeste und jede Menge Reling und fertig ist das RAS-Portal.

Schreibe einen Kommentar