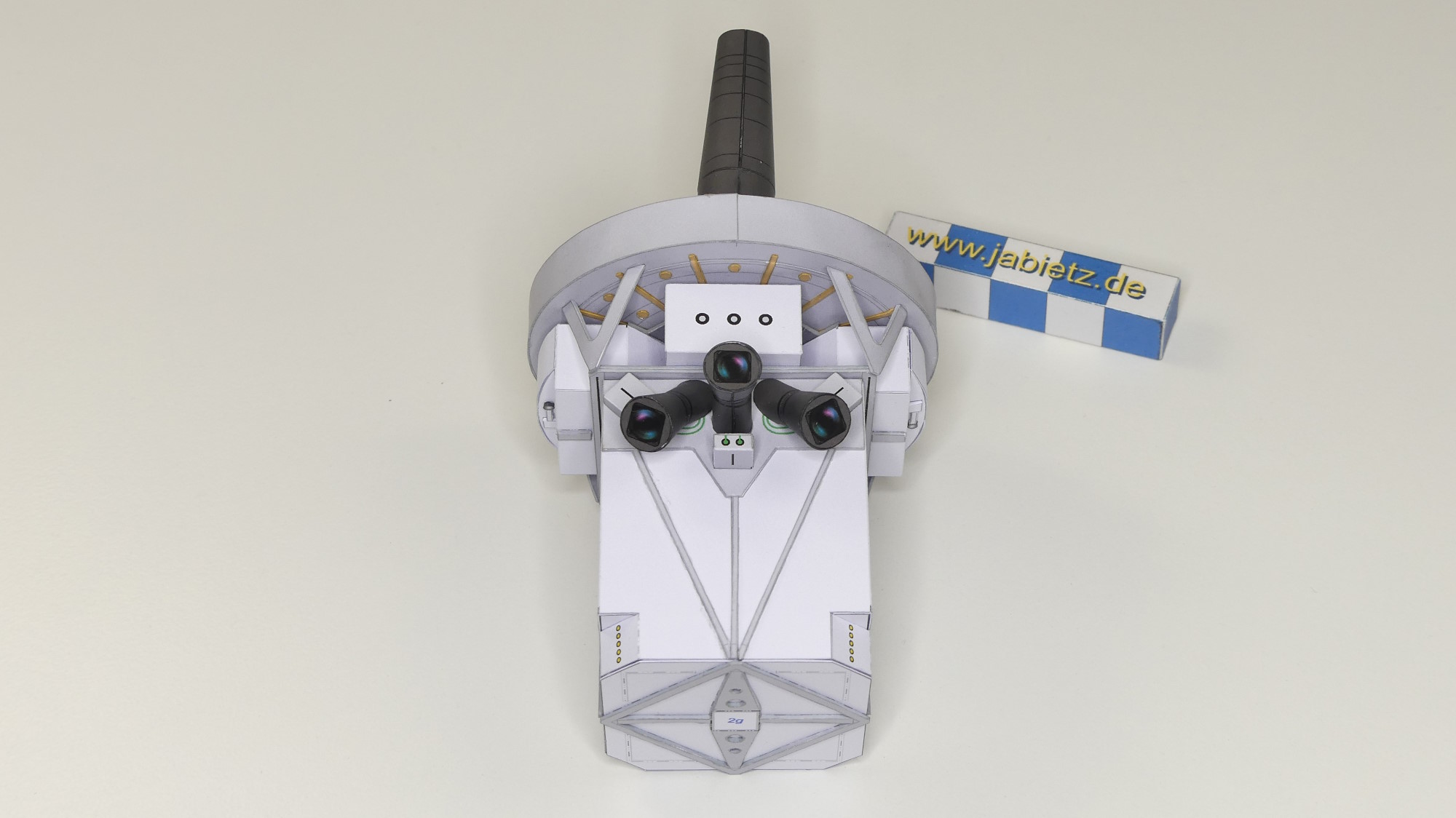
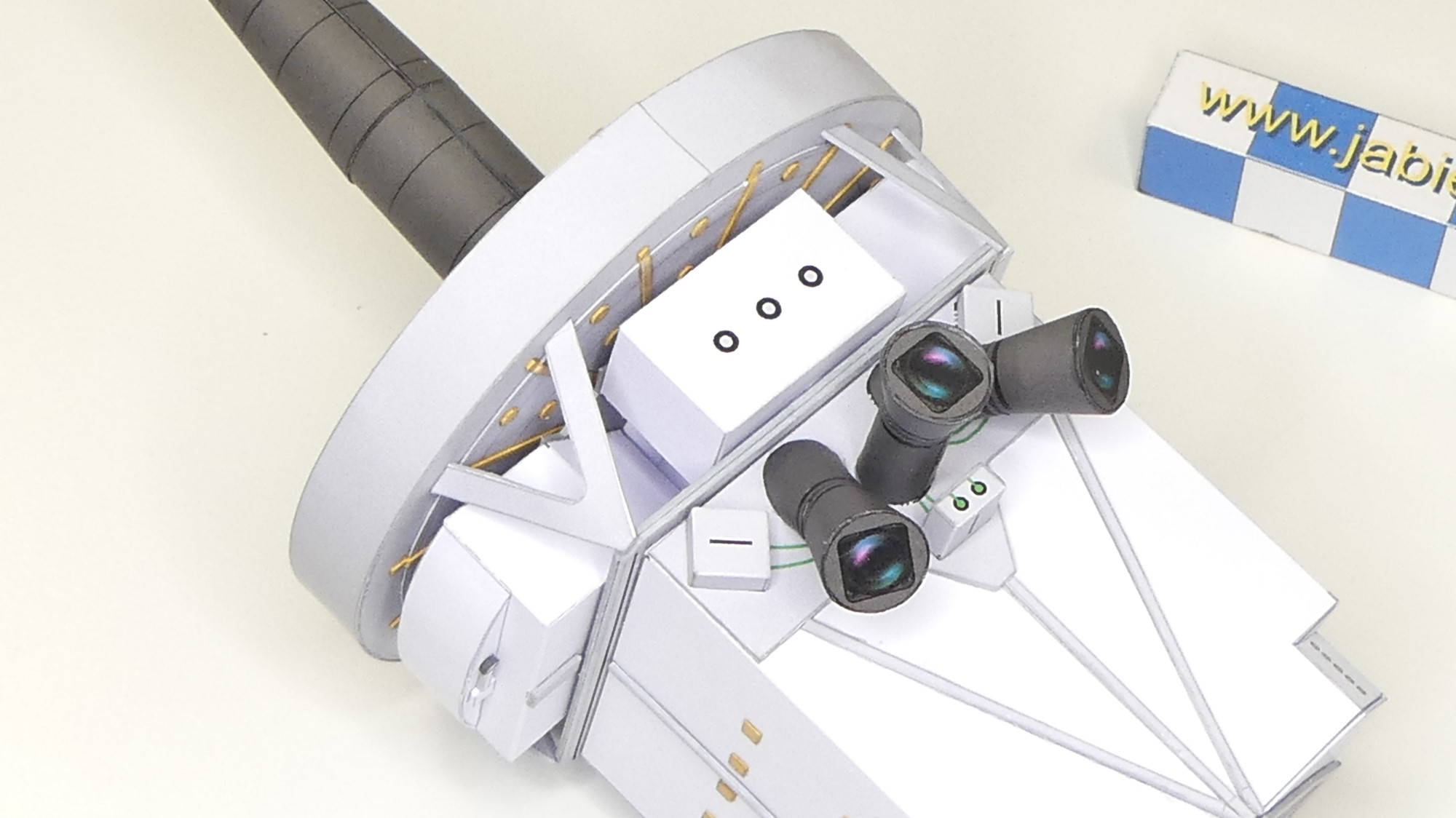
Die fünfte Baugruppe enthält die Kameras für die Lagebestimmung, indem sie die Positionen und Helligkeiten von Sternen in ihrem Sichtfeld messen. Der Bordcomputer gleicht die Muster, die von den Fixed Head Star Trackern bereitgestellt werden, mittels einer Sternenkarte ab und kann entsprechende Maßnahmen zur Lagekorrektur einleiten.
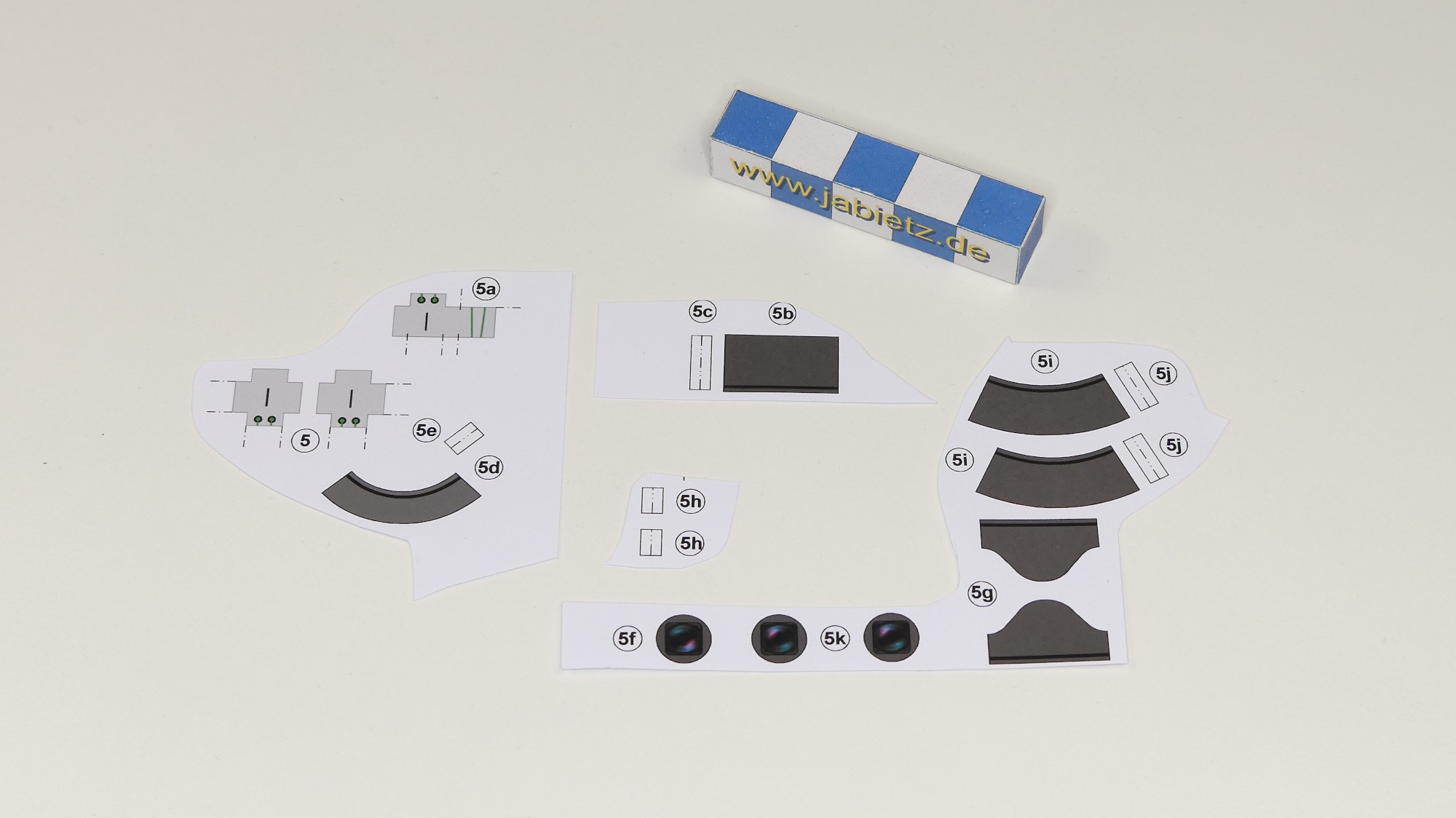
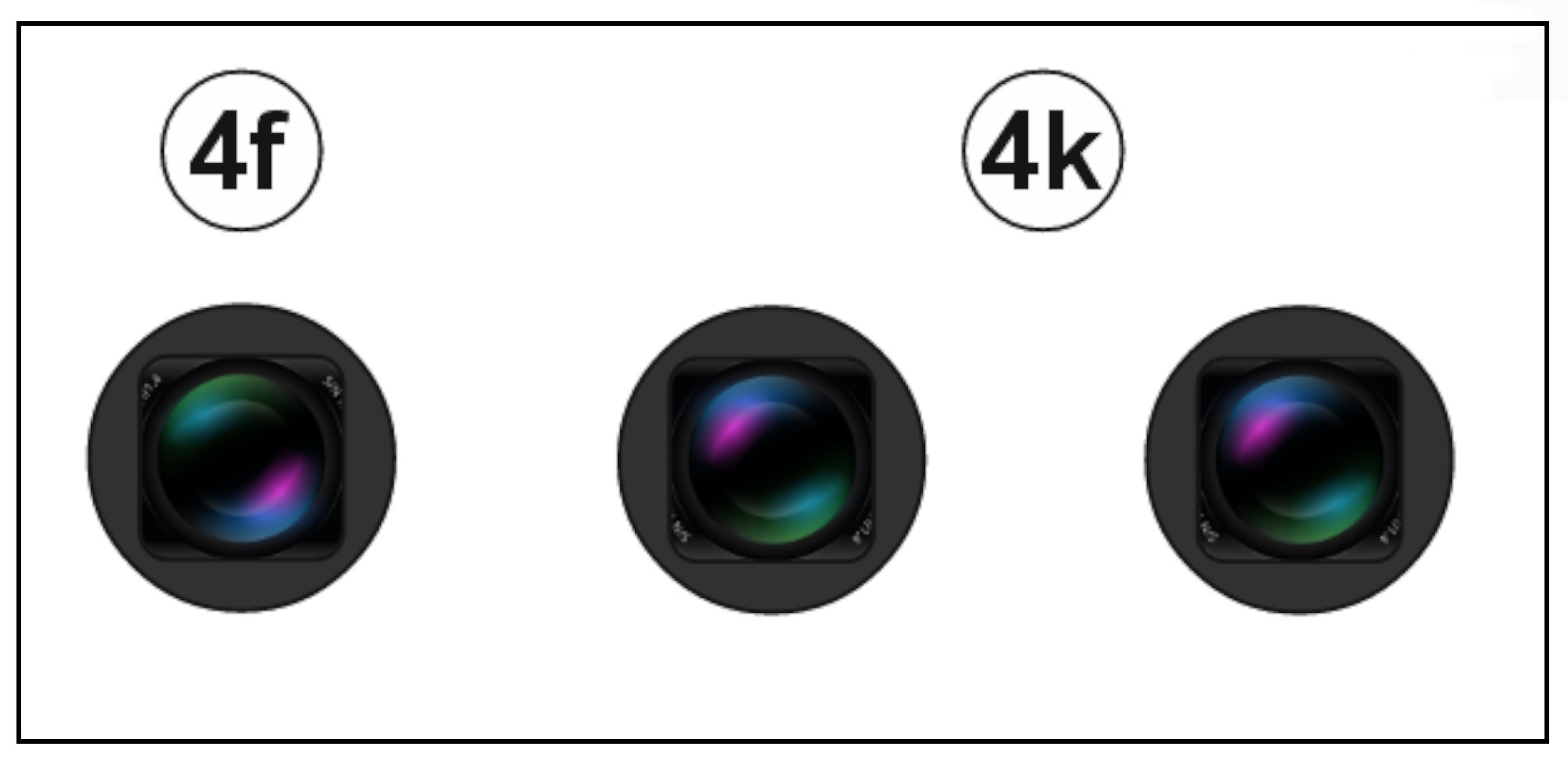
Hier zunächst wieder die Bauteile und ein Beispiel meiner Texturen für die Kameras.
Der Zusammenbau der Bauteile ist kein Hexenwerk. Somit hier gleich das Ergebnis…
Schreibe einen Kommentar