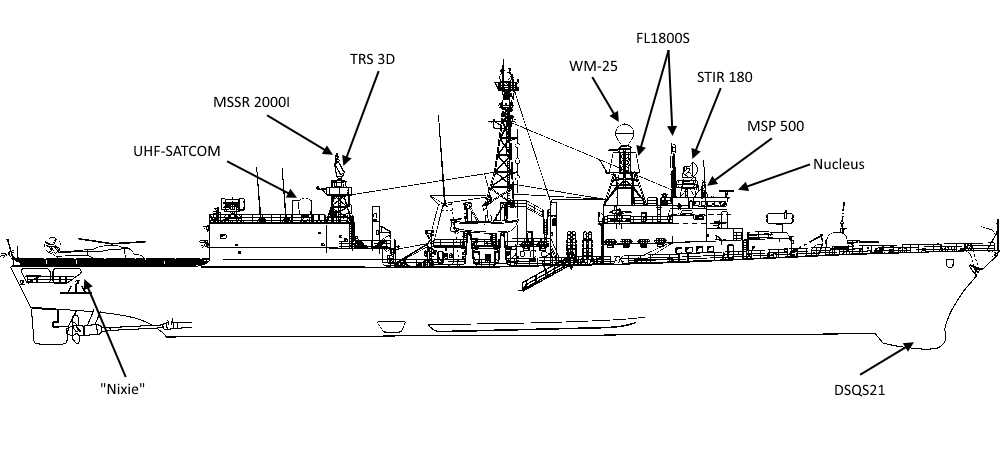
See- und Luftraumradar TRS3D/32
Das TRS-3D ist ein modulares Multimode 3D-Radar im G-Band für die Entdeckung und automatische Verfolgung von Luft- und Seezielen – besonders tieffliegender kleiner Ziele (Seaskimmer) mit geringer effektiver Reflexionsfläche, welches für den Einsatz auf Booten und Schiffen konzipiert wurde. Das Multimode Akquisitionsradar verwendet eine Phased Array Antenne, für gleichzeitige Aufklärung und Zielverfolgung mit Waffenzuweisung, welche mit einer elektronischen Stabilisierung gegen Nicken und Rollen versehen ist und nutzt einen besonderen Kanal für die Aufklärung tieffliegender Marschflugkörper und Kampfhubschrauber.
Die Antenne besteht aus 32 Zeilen mit je 46 Elementen. Elektronische Phasenschieber erzeugen einen vertikal geschwenkten schmalen Pencil-Beam. Sie kann entweder nur linear polarisiert arbeiten oder mit einer Polarisationsumschaltung ausgerüstet sein.


Cassidian MSSR 2000I
IFF – „Identify Friend or Foe“.
Hochmoderne Identifizierungssysteme wie das MSSR 2000I ermöglichen die zuverlässige Identifizierung der Flugzeuge von eigenen und verbündeten Einheiten und verringern so die Gefahr von Freundbeschuss.
Bei der militärischen Freund-Feind-Erkennung arbeitet das MSSR 2000I nach standardisierten Abfrage-Antwort-Mustern, um anfliegende Flugzeuge verbündeter Truppen rasch zu erkennen und damit die Befehlshaber bei der Bekämpfungsentscheidung zu unterstützen. Zur Vermeidung einer Signalmanipulation von feindlicher Seite kommen beim MSSR 2000I hochentwickelte Verschlüsselungsverfahren zum Einsatz.

Feuerleitradar WM-25/STIR 180
Seezielrundsuch- und Feuerleitradar für SeaSparrow.
„STIR“ (Signaal Track and Illuminating Radar) ist das Zielverfolgungs- und Beleuchtungsradar für die SeaSparrow-Flugkörper.


Multisensor MSP 500
Die Multi Sensor Plattform MSP 500 ist ein vielseitig verwendbares, hochgenau stabilisiertes elektrooptisches Sensorsystem großer Reichweite zur Entdeckung, Beobachtung und Identifizierung von See-, Land und Flugzielen, das auch für die automatische Zielverfolgung und Feuerleitung für Rohrwaffen verwendet werden kann.
Die MSP 500 besteht aus einem stabilisierten Sensorpaket mit Wärmebildkamera, Tageslichtkamera, Laserentfernungsmesser und Videotracker sowie optional einem Feuerleitmodul und ist bei Tag und Nacht auch unter schwierigen Wetterverhältnissen einsetzbar.

ELOKA FL1800S
Das FL 1800 ist das Standard-EloKa-System der Deutschen Marine. Es besteht aus vier ESM-Kästen, von denen jeder zwei zusammengefasste Antennenflächen enthält. Die Antennenflächen decken einen Frequenzbereich von 0,5 bis 18 GHz ab, wobei für jedes Band zehn Spiralantennen zur Verfügung stehen.
Das System kann durch die Computer-Racks unter Deck den Elevations- und Azimutwinkel zu einem Emitter präzise bestimmen und den Mehrwegempfang herausrechnen. Zur Störung der gegnerischen Radare existieren vier weitere Antennenflächen, welche durch passiv phasengesteuerte Signalkeulen mit acht Wanderfeldröhren im Frequenzbereich von 7,5 bis 18 GHz elektronische Gegenmaßnahmen durchführen.
Jede Signalkeule kann ein Einzelziel stören oder im Verbund gemeinsam ein Radar. Die effektive Strahlungsleistung ist ausreichend, um den RCS der Fregatte zu überdecken. Die Variante „S“ besitzt neben Hardwareverbesserungen und der Fähigkeit zu gepulsten Rauschstörungen noch ein Feature zur Entfernungsschätzung auf Basis der Amplitude, beispielsweise um RAM-Flugkörper im Anti-Radar-Schiff-Luft-Modus auf Seezielflugkörper und Flugzeuge abfeuern zu können.


Sonar DSQS 21BZ
Sonar (Sound, Navigation and Ranging) ist die Bezeichnung für Unterwasser-Ortungsanlagen und das Unterwasser-Gegenstück zum Radar. Anstelle von Funkwellen werden hier Schallwellen zu Nutze gemacht.
Aufgabe der Sonaranlage ist es Ziele aufzuspüren und genaue Zieldaten für den Waffeneinsatz zu gewinnen (Peilung, Entfernung, Kurs, Tiefe, Geschwindigkeit, Typ). Generell gilt, dass die Leistungsfähigkeit eines Sonargerätes, egal ob aktiv oder passiv, sehr stark von den Umgebungsbedingungen abhängt (Wassertemperatur, Salzgehalt, Seegang, …).
Beim aktiven Sonar werden Schallwellen (Pings) ausgesendet, von Objekten reflektiert und wieder aufgefangen. Dadurch ergibt sich die Richtung und Entfernung zum Ziel. Ein aktives Sonar verrät jedoch auch die eigene Position.

Link 11 / Link 16
Link 11 bezeichnet einen militärischen Datenaustausch-Standard für Datenlinks der NATO, der speziell bei der Marine, aber auch in Teilen bei der Luftwaffe (Link 11B) genutzt wird.
Link 11 nutzt UHF- bzw. HF-Funkverbindungen zur Übertragung der digitalen Information, wobei eine Net Control Station alle im Netz befindlichen Einheiten nacheinander abfragt (Full Roll Call). Wegen seiner Störanfälligkeit und geringen Datenrate ist es heute technisch veraltet.
1975 begannen die Entwicklungen zu Link 16 und die US Navy lieferte die ersten Link-16-Anwendungen Mitte der 1990er-Jahre aus. Trotzdem dient Link 11 bei vielen Marinen nach wie vor als primäres Informationsmedium für den Lagebildaustausch und die Befehlsgebung in Echtzeit.
Link 16 bezeichnet einen taktischen Datenlink der NATO, der als digitaler Datendienst definiert ist. Mittels Link 16 können Flugzeuge, Schiffe und Heereseinheiten eines Verbandes ihre Lageinformationen mit sehr geringer Verzögerungszeit übertragen. So kann beispielsweise eine AWACS-Maschine aufgeklärte Ziele sowohl einer Bodenstation als auch direkt anderen Flugzeugen mitteilen. In jüngster Zeit finden Entwicklungen statt, Link 16 vermehrt auch für den Informationsverbund von zur Abwehr ballistischer Raketen geeigneten Waffensystemen zu nutzen.
Führungssystem SAT IR
Akronym für „System zur Auswertung taktischer Informationen auf Rechnerschiffen“ und bezeichnet den Eigennamen eines Führungssystems der Deutschen Marine.
Basierend auf dem Zentralrechner AN/UYK-43 verfügt das System über eine vollständige Integration der Waffensysteme, der EloKa-Anlage sowie zwei unabhängig voneinander arbeitende Link 11-Kanäle mit rudimentärer Routing-Funktion.
Torpedotäuschkörper SQL-25 „Nixie“
Die AN/SLQ-25 Nixie ist ein geschlepptes Täuschkörpersystem gegen Torpedos und wurde in den 1960er Jahren entwickelt und ab den 1970er Jahren eingesetzt.
Das System besteht aus einem stromlinienförmigen Täuschkörper, der einen Schallerzeuger enthält und an einem langen Kabel etwa 300 m hinter dem Schiff hergeschleppt wird, sowie einem Signalerzeuger an Bord des Schiffs. Die Funktion des Täuschkörpers besteht darin, das passive Sonar des angreifenden Torpedos vom eigentlichen Ziel, dem Schiff, abzulenken, indem es die Geräusche des Schiffs imitiert.
Zumeist sind zwei Täuschkörper auf den Schiffen vorhanden, die paarweise verwendet werden.

Navigationsradar Nucleus 5000
Als Navigationsradar wird das „Nucleus 5000“ von Kelvin Hughes verwendet.

UHF-SATCOM
(hier habe ich leider derzeit keine weiteren Informationen)

Sonstige Sensoren
Des Weiteren sind verschiedene Wetter-Sensoren für Windgeschwindigkeit, -richtung, Luftdruck (Bb) und ABC-Bedrohung (Stb) sowie Funk-Antennen am Großmast angebracht.
Weitere Sensoren dürften GPS-Empfänger sein, das GMDSS („Global Maritime Distress and Safety System“) und eine Satelliten-Telefonanlage für INMARSAT sein. Dazu habe ich aber leider keine Infos.

